

يُعد استكشاف أسطح الكواكب، وخاصة كوكب المريخ، عملية معقدة وبطيئة للغاية. إذ تستغرق عملية الاتصال بين الأرض والمركبات الروبوتية على المريخ من 4 إلى 22 دقيقة، كما أن محدودية نقل البيانات تقيّد حجم المعلومات المتبادلة.
وبسبب هذه التحديات، يضطر العلماء إلى التخطيط المسبق لتحركات المركبات، التي صُممت لتوفير الطاقة وتجنب المخاطر، ما يجعلها تتحرك ببطء شديد عبر التضاريس الوعرة، وغالبا لا تتجاوز مسافة بضع مئات الأمتار يوميا.
روبوت شبه ذاتي لتسريع الاستكشاف
لتجاوز هذه القيود، طوّر الباحثون روبوتا شبه ذاتي قادرا على التنقل بين عدة مواقع وجمع البيانات دون الحاجة إلى توجيه بشري مستمر.
بدلا من التركيز على هدف واحد، يمكن لهذا الروبوت الاقتراب من عدة نقاط وإجراء القياسات بشكل مستقل، مما يزيد من كفاءة عمليات الاستكشاف.
تحسين البحث عن دلائل الحياة
أظهرت النتائج أن استخدام روبوتات مزودة بأدوات علمية مدمجة يمكن أن يسرّع عمليات البحث عن الموارد الطبيعية و"البصمات الحيوية"، وهي المؤشرات التي قد تدل على وجود حياة سابقة.
من خلال تحليل عدة مواقع متتالية، يستطيع الروبوت جمع كمية أكبر من البيانات في وقت أقل، ما يعزز من فرص الاكتشاف العلمي.
اختبار روبوت ANYmal في بيئة تحاكي المريخ
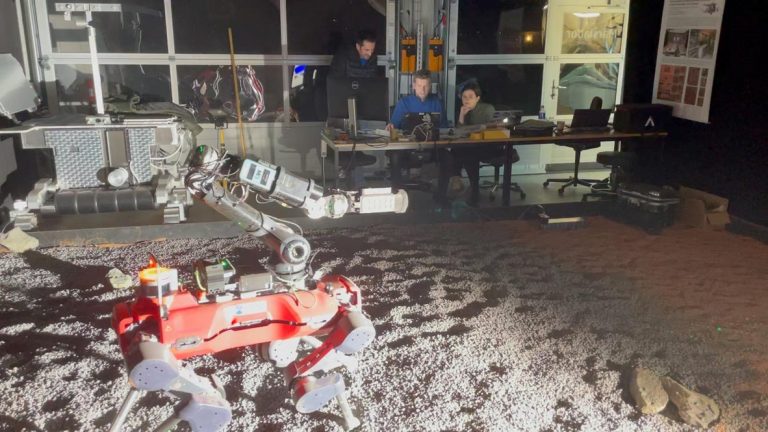
اعتمد الباحثون على روبوت رباعي الأرجل يُعرف باسم ANYmal، مزوّد بذراع آلية تحمل أدوات تحليل متقدمة، منها جهاز تصوير مجهري ومطياف رامان المحمول.
تم تطوير المشروع بالتعاون مع ETH Zurich، وUniversity of Zurich، وUniversity of Bern.
وأُجريت التجارب داخل منشأة Marslabor في Basel، وهي بيئة تحاكي ظروف الكواكب باستخدام صخور ومواد شبيهة بتربة المريخ وإضاءة مماثلة.
نتائج دقيقة رغم السرعة
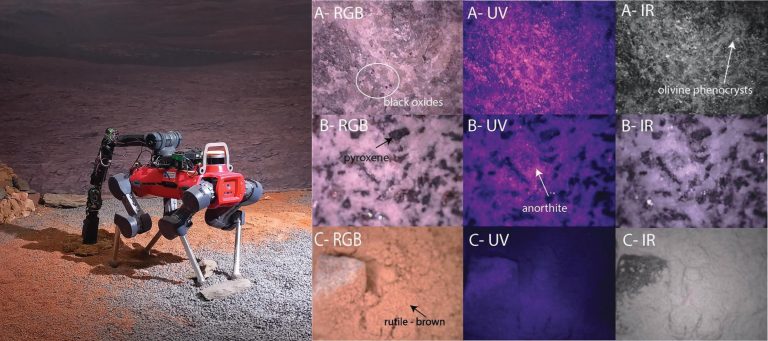
خلال الاختبارات، تمكن الروبوت من التحرك بشكل مستقل نحو الأهداف المحددة، واستخدام أدواته لتحليل الصخور وإرسال الصور والبيانات الطيفية.
نجح النظام في التعرف على أنواع مختلفة من الصخور المهمة علميًا، مثل الجبس والبازلت والكربونات، وهي مواد قد تشير إلى موارد قيمة أو بيئات مناسبة للحياة.
أداء أسرع بثلاثة أضعاف
قارن الباحثون بين طريقتين:
الطريقة التقليدية التي تعتمد على توجيه بشري لكل خطوة
والطريقة شبه الذاتية التي يعمل فيها الروبوت بشكل مستقل
وأظهرت النتائج أن المهام متعددة الأهداف استغرقت بين 12 و23 دقيقة فقط، مقارنة بـ41 دقيقة في الطريقة التقليدية.
ورغم السرعة، حافظ الروبوت على دقة عالية، حيث تمكن في إحدى التجارب من تحديد جميع الأهداف بشكل صحيح.
توسيع نطاق الاستكشاف العلمي
يسمح هذا النهج بتغطية مساحات أكبر من سطح الكواكب خلال وقت أقصر، مما يمنح العلماء فرصة تحليل المزيد من المواقع وتحديد المناطق الأكثر أهمية للدراسة التفصيلية.
كما يقلل الاعتماد على التوجيه البشري المباشر، ما يمنح الروبوت حرية أكبر في الحركة واتخاذ القرار.
مستقبل استكشاف القمر والمريخ
تشير هذه الدراسة إلى أن الجمع بين الروبوتات شبه الذاتية والأدوات العلمية البسيطة يمكن أن يحقق نتائج علمية مهمة بكفاءة عالية.
ومع استعداد وكالات الفضاء لمهام مستقبلية إلى القمر والمريخ، قد تلعب هذه الروبوتات دورًا رئيسيًا في استكشاف الموارد والبحث عن آثار الحياة، من خلال تغطية مساحات أوسع في وقت أقل.






